Remote Robot V3
Ein Allrad Robot
Inspieriert zum Roboterbau wurde ich durch die Marssonde Pathfinder.
Die Amerikaner schicken einen hutschachtelgroþen mobilen Roboter
zum Mars und steuern ihn von der Erde fern.
Der Roboter schickt Bilder per Funk zur Erde und weicht
mit seinem integrierten Computer selbst‰ndig Hindernissen aus.
So einen Robot m¸sste man doch selbst bauen kˆnnen, dachte ich mir.
Zwar nicht mit so einer groþen Reichweite,
aber wer hat schon eine 30 m Parabolantenne in seinem Garten stehen?
Angefangen habe ich damals mit kleinen Robotern.
Als Antrieb hatte mein erster Robot 2 R‰der und vorne ein Schrankrad,
sodaþ er auf der Stelle drehen konnte.
Als Motore fungierten damals umgebaute Servomotore aus dem Modellbaubereich.
Er war sehr mobil und konnte Hindernissen ausweichen.
Ich hatte jedoch immer das Problem, daþ er die T¸rschwelle
meiner Werkstatt nicht ¸berwinden konnte, weil das Schrankrad
daran h‰ngen blieb. Und so entschloss ich mich dazu,
den Robot umzubauen und ihm grˆþere R‰der zu geben.
Zwei groþe Getriebemotore dienten als Antrieb.
Enstanden ist dann das dabei, s. Bild unten:
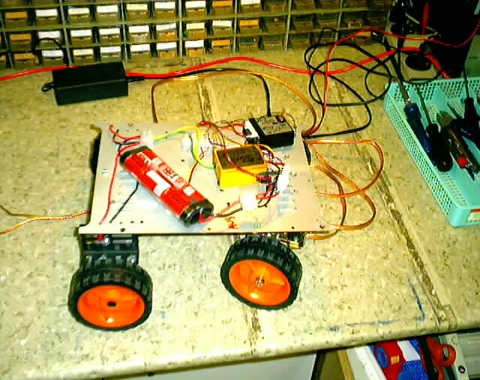 Ich installierte eine Modellbaufernsteuerung, um die Fahreigenschaften
zu testen:
Ich installierte eine Modellbaufernsteuerung, um die Fahreigenschaften
zu testen:
 Als ich das Fahrgestell dann fahren liess, war ich ¸berrascht,
wie schnell und gut es fuhr. Ja sogar die Schwelle schaffte
es ohne Probleme.
Ein Film zur Testfahrt kann hier geladen werden: -> LINK
Ich war sehr zufrieden mit dem Ergebnis.
Dann aber kam mir der Gedanke, daþ ein Robot sich mit einer
solchen Lenkung nur sehr schwer programmieren l‰sst, um
Wege zu finden und abzufahren.
Deshalb dachte ich, w‰re es wohl besser ein Fahrgestell zu
konstruieren, welches sich auf der Stelle drehen kann.
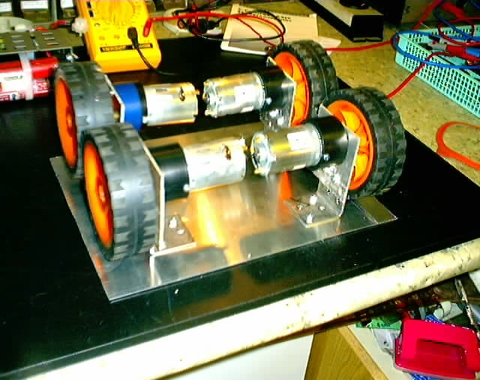
Und so installierte ich zus‰tzliche 2 Motore und hatte
einen Allradantrieb.
Ansicht von unten:
Als ich das Fahrgestell dann fahren liess, war ich ¸berrascht,
wie schnell und gut es fuhr. Ja sogar die Schwelle schaffte
es ohne Probleme.
Ein Film zur Testfahrt kann hier geladen werden: -> LINK
Ich war sehr zufrieden mit dem Ergebnis.
Dann aber kam mir der Gedanke, daþ ein Robot sich mit einer
solchen Lenkung nur sehr schwer programmieren l‰sst, um
Wege zu finden und abzufahren.
Deshalb dachte ich, w‰re es wohl besser ein Fahrgestell zu
konstruieren, welches sich auf der Stelle drehen kann.
Und so installierte ich zus‰tzliche 2 Motore und hatte
einen Allradantrieb.
Ansicht von unten:
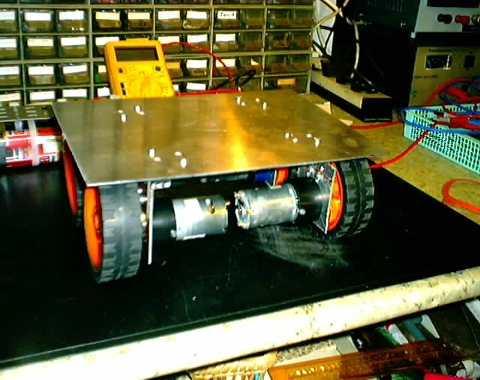
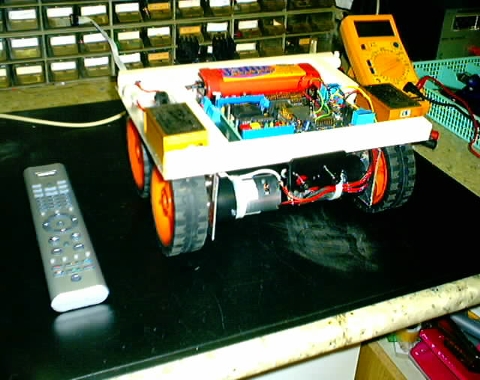
 Ansicht von oben:
Ansicht von oben:
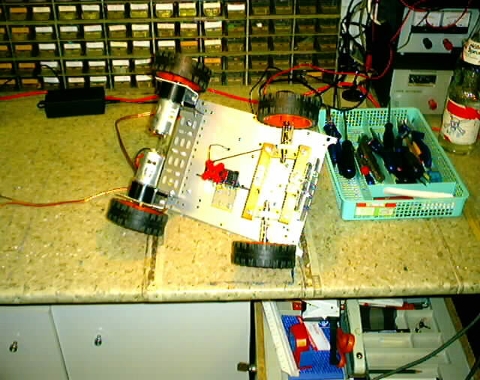
 Das Teil machte einen sehr robusten Eindruck und konnte jetzt sogar
auf der Stelle drehen. Sp‰ter installierte ich noch eine
C-Control I als Computer, ein paar Sensoren, einen Funktransceiver und ein paar
Motorregler:
Das Teil machte einen sehr robusten Eindruck und konnte jetzt sogar
auf der Stelle drehen. Sp‰ter installierte ich noch eine
C-Control I als Computer, ein paar Sensoren, einen Funktransceiver und ein paar
Motorregler:
E-Mail Kontakt
Robotik
Zurück zur Hauptseite