 Projekt Tisch Roboter TR1
Projektbeginn: 2005
Programmbeginn: 3.12.06
Da ich bisher nur größere Roboter konstruiert hatte, wollte ich mal einen sehr kleinen Roboter bauen.
Dies ging nur bei Verwendung eines relativ kleinen Prozessors. Ich verwendete einen PIC 16F84.
Diesen Robot habe ich nur so zum Spass konstruiert.
Dass man über diesen kleinen Robot einmal in einem Buch nachlesen werden kann,
welches man jetzt überall kaufen kann,
hätte ich damals nicht gedacht.
Es reizte mich regelrecht einen so kleinen 18-beinigen IC als Steuerprozessor einzusetzen.
Gesagt getan, als erstes modifizierte ich 4 Miniservos und klebte Legoräder daran.
Projekt Tisch Roboter TR1
Projektbeginn: 2005
Programmbeginn: 3.12.06
Da ich bisher nur größere Roboter konstruiert hatte, wollte ich mal einen sehr kleinen Roboter bauen.
Dies ging nur bei Verwendung eines relativ kleinen Prozessors. Ich verwendete einen PIC 16F84.
Diesen Robot habe ich nur so zum Spass konstruiert.
Dass man über diesen kleinen Robot einmal in einem Buch nachlesen werden kann,
welches man jetzt überall kaufen kann,
hätte ich damals nicht gedacht.
Es reizte mich regelrecht einen so kleinen 18-beinigen IC als Steuerprozessor einzusetzen.
Gesagt getan, als erstes modifizierte ich 4 Miniservos und klebte Legoräder daran.
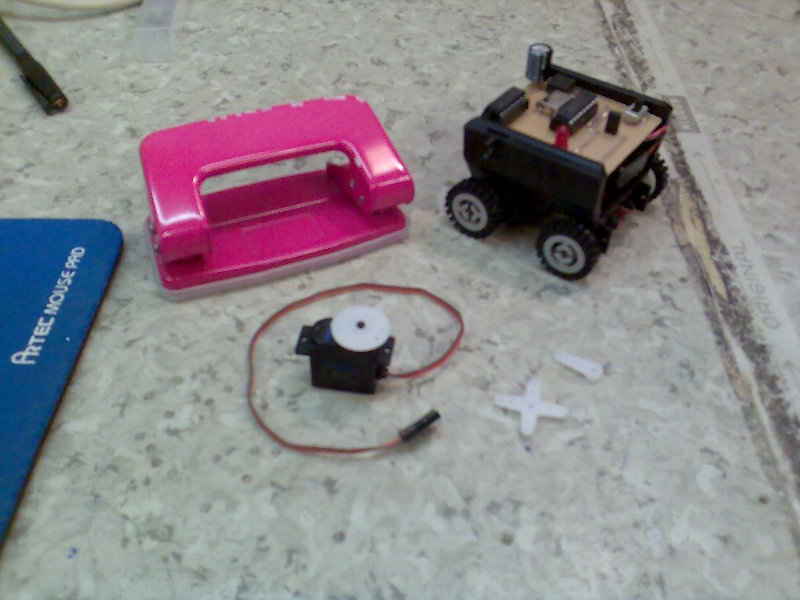
Nachdem der Klebstoff getrocknet war klebte ich die 4 Servos an ein Plastikgehäuse, so dass ich einen Allradantrieb erhielt: s.u.
Ein fahrbares Untergestell war fertig. Ich konnte es natürlich kaum erwarten,
das Fahrgestell die ersten Runden drehen zu lassen. Deshalb schloss ich es an eine 5 Volt Gleichspannung an
(kabelgebunden natürlich) und musste leider zu meinem Bedauern feststellen,
dass sich zwar die Räder drehten, aber das Fahrgestell sich nicht vorwärts bewegte.
Das verwendete Material war so leicht, dass die Reifen des Fahrgestells keinerlei Traktion
auf die Tischoberfläche ausübte. Ich konnte deshalb auch nicht testen, was wohl passieren würde,
wenn ich das rechte und das linke Reifenpaar gegenläufig anschließen würde so,
dass das Gestell sich auf der Stelle drehen würde wie ein Panzer. Ich hab’s zwar probiert,
aber das Teil hat sich nicht bewegt. Langsam bekam ich Bedenken, ob ich da überhaupt ein
fahrfähiges Untergestell für meinen neuen Robot konstruiert hätte.
Aber dann überlegte ich mir, dass ja noch einiges an Gewicht hinzukommen würde,
eine Platine, ein 9 Volt Batterieblock etc.
Und deshalb machte ich mich daran die Prozessor-Steuerplatine für den Robot zu konstruieren.
Den PIC16F84 brachte ich in der Mitte der Platine an.
Ich benötigte noch ein 5 Volt Stabilisierungs IC 78T05CT, um die 9 Volt der
Blockbatterie in 5 Volt umzuwandeln. Der PIC brauchte noch einen 4 MHz Quarz.
Zusätzlich musste Ein/Aus-Schiebeschalter drauf. Und das wichtigste ein Motortreiber-IC.
Hierzu verwendete ich einen L293D.
Eine rote LED zur Kontrolle kam auch noch hinzu. Nachdem ich die Platine fertigestellt hatte,
machte ich erst mal einen Versuch den neuen Prozessor zu programmieren und testete dies
mit der neuen LED als Kontrollleuchte. Hab danach noch die Servos mit der Platine
verbunden und einen 9-Volt-Batterieklipp installiert und eine Batterie angeschlossen.
Ich entwickelte ein Programm für den TR1, welches ihn in dazu befähigte ein Quadrat abzufahren.
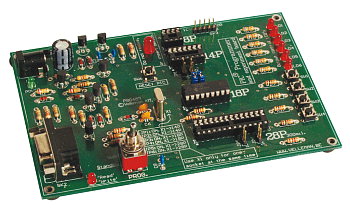
Zur Übertragung des Programms verwendete ich das PIC Programmier und Experimentierboard
der Firma Conrad Elektronic (Conrad-Bestellnummer 191020) s.u.
 Der Tischrobot TR1 ist fertig
Dieser kleine Robot hat es, wie bereits vorab erwähnt, sogar in ein Buch geschafft,
welches ein Freund von mir geschrieben hat.
Seine Internetseite sommer-robotics.de findet man bei meinen beliebten Links.
Ich habe ein Kapitel über den kleinen Tischroboter TR1 für sein Buch geschrieben.
Das Buch heisst: "Roboter selbst bauen"
Einfach mal googeln! Das Buch findet man mittlerweile überall.
Der Tischrobot TR1 ist fertig
Dieser kleine Robot hat es, wie bereits vorab erwähnt, sogar in ein Buch geschafft,
welches ein Freund von mir geschrieben hat.
Seine Internetseite sommer-robotics.de findet man bei meinen beliebten Links.
Ich habe ein Kapitel über den kleinen Tischroboter TR1 für sein Buch geschrieben.
Das Buch heisst: "Roboter selbst bauen"
Einfach mal googeln! Das Buch findet man mittlerweile überall.